Evaluation-related tasksLink
These tasks require the definition of a ground truth.
EvaluationTaskLink
This is the base (abstract) evaluation task.
PointCloudSegmentationEvaluationLink
PointCloudEvaluationLink
Segmentation2DEvaluationLink
VoxelsEvaluationLink
CylinderRadiusEstimationLink
Thanks to ground truth derived from virtual plants data, most of the reconstruction tasks can be properly evaluated.
However, the acquisition made by the plant imager can not be assessed with virtual ground truth and needs some from real world with an adapted comparison method.
The 2 main outputs of the plant imager are a set of images and the corresponding positions from the robotic arm.
Those data are used later in the reconstruction pipeline, therefore their precision can be evaluated by the precision of the reconstructed object.
The evaluation of this acquisition component will be described in this section.
ObjectiveLink
The goal here is to be able to evaluate the precision of an acquisition by comparing the measurement of a specific trait in an actual object with the same feature in its reconstruction.
One basic shape that can often be encountered in plants is the cylinder (stem are often cylindrical, and sometimes so are fruits).
It has been therefore chosen as model from which to extract main characteristics (as the height or the radius).
In this evaluation we focused on the radius estimation.
The several steps are:
- Make an acquisition of a cylindrical object
- Generate a point cloud from the collected images
- Estimate the radius of the reconstructed object and compare it with the "ground truth" radius
PrerequisiteLink
- install romi
plant-imager(from source or using a docker image ) & read install procedure - install romi
plant-3d-vision(from source or using a docker image) & read install procedure - Create and activate isolated python environment (see the procedure here )
Step-by-step tutorialLink
1. Image a cylindrical objectLink
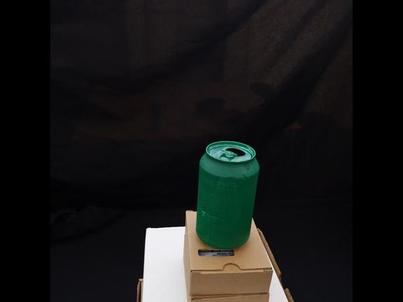
In order to have a precise measurement of the object radius, it can be a good idea to use manufactured items with a calibrated size. In our case we chose to evaluate our plant imager with a can.
Note
Be careful to be able to detect your object from the background in the future reconstruction process.
Different segmentation methods are described here and as we use the "Binary segmentation" algorithm the can has been painted in a very tasteful green.
The procedure to take images is described in the plant imager tutorial but here are the basic steps:
- DB creation
mkdir path/to/db touch path/to/db/romidb - Run an acquisition with the
Scantask, and ahardware.tomlconfiguration file in the newly created DB
romi_run_task Scan /path/to/db/imageset_id/ --config plant-imager/configs/hardware.toml - The
imageset_idfileset is now filled :
db/ ├── imageset_id/ │ ├── files.json │ ├── images/ │ ├── metadata/ │ │ └── images/ │ │ └── images.json │ └── scan.toml └── romidb
As for the AnglesAndInternodes measurement, in order for the CylinderRadiusEstimation to retrieve the ground truth radius value, it must be added manually in a imageset_id/measures.json file:
{
"radius":7.95
}
2. Point cloud reconstructionLink
The next step is to compute a point cloud from the acquired data. As before, the full explanation of the operations concerning the reconstruction pipeline can be found in this tutorial but mainly are:
romi_run_task PointCloud /path/to/db/imageset_id/ --config plant-3d-vision/configs/pipeline.toml
Resulting an equivalent of this tree structure (depending on the used configuration file):
db/
├── imageset_id/
│ ├── Colmap__/
│ ├── files.json
│ ├── images/
│ ├── Masks__/
│ ├── measures.json
│ ├── metadata/
│ │ └── images/
│ │ └── images.json
│ ├── pipeline.toml
│ ├── PointCloud__/
│ ├── scan.toml
│ ├── Undistorted__/
│ └── Voxels__/
└── romidb
Note
Be sure to obtain a proper reconstructed cylinder (as maybe a section of the object) by checking if you are satisfied with the PointCloud_created_fileset/PointCloud.ply point cloud in you favorite 3d software.
 If not, you can try to modify parameters in the
If not, you can try to modify parameters in the pipeline.toml configuration file as:
- the bounding box in the Colmap section
- the threshold parameter (or equivalent) of the Masks task
- the voxel_size linked to the Voxels task
3. Cylinder Radius EvaluationLink
It is now possible to extract the radius from the point cloud using the CylinderRadiusEstimation.
Parameters in the pipeline.toml associated to the task must be defined accordingly:
[CylinderRadiusEstimation]
upstream_task = "PointCloud"
Note
By default the upstream_task parameter of CylinderRadiusEstimation is CylinderRadiusGroundTruth
With the following command line:
romi_run_task CylinderRadiusEstimation /path/to/db/imageset_id/ --config plant-3d-vision/configs/pipeline.toml --module plant3dvision.tasks.evaluation
The CylinderRadiusEstimation.json can be found in the CylinderRadiusEstimation__ fileset with the output results:
{
"calculated_radius": 8.265318865620745,
"gt_radius": 7.95,
"err (%)": 3.97
}
Evaluate the cylinder radius estimation taskLink
To assess the accuracy of the cylinder radius estimate from a point-cloud, we developed a CylinderRadiusGroundTruth task.
It produces a ground truth point-cloud with a cylinder shape.
By default, random dimensions (height and radius) are assumed.
To generate the cylinder point-cloud, assuming you did set a ROMI_DB environment variable to your local database:
0. Set a ROMI_DB environment variable pointing to your local database:
export ROMI_DB=$USER"/romi_db/"
virtual_cylinder:
mkdir $ROMI_DB/virtual_cylinder
romi_run_task CylinderRadiusGroundTruth $ROMI_DB/virtual_cylinder/ --module plant3dvision.tasks.evaluation
You may want to specify a radius and/or height in the toml config:
[CylinderRadiusGroundTruth]
radius=66.6
height=13.0
To evaluate of the CylinderRadiusEstimation task thanks to the virtual cylinder generated by CylinderRadiusGroundTruth:
0. Set a ROMI_DB environment variable pointing to your local database:
export ROMI_DB=$USER"/romi_db/"
CylinderRadiusEstimation task with:
romi_run_task CylinderRadiusEstimation $ROMI_DB/virtual_cylinder/ --config plant-3d-vision/configs/virtual_cylinder.toml --module plant3dvision.tasks.evaluation